Настройка режима работы «Безопасное вождение» для МТ-900 One/LiteCAN
Управление настройками режима работы «Безопасное вождение» осуществляется в отдельной вкладке (во внутренних датчиках).
I. Режим работы «Безопасное вождение» имеет следующие параметры:
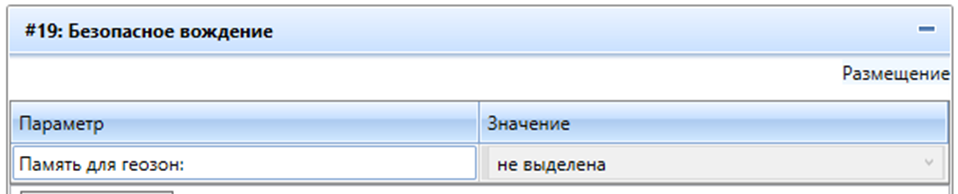
• «Память для геозон» - отображает загружены ли файлы ПОС в Терминал.
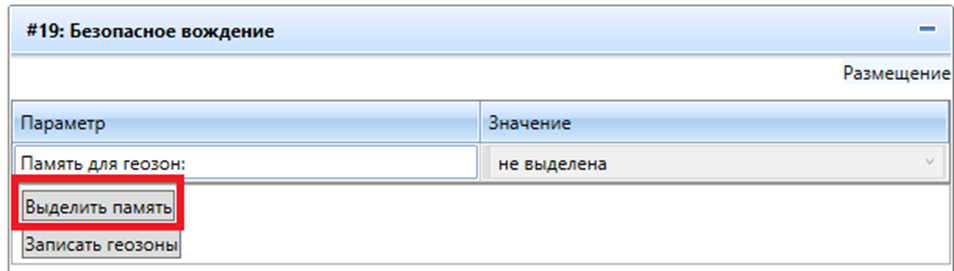
• Кнопка «Выделить память» - позволяет выделить память для хранения файла ПОС.
• Кнопка «Записать геозоны» - позволяет загрузить файл ПОС в память Терминала.
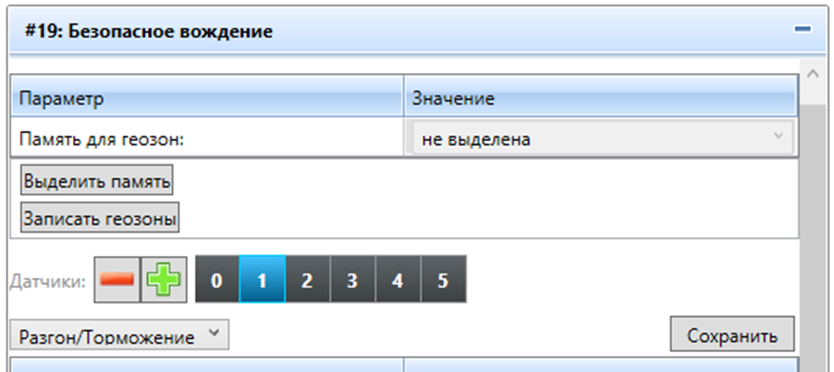
• «Датчики» - позволяет настроить различные датчики.
II. Для режима работы «Безопасное вождение» можно настроить следующие типы датчиков:
а) «Нарушение скоростного режима» позволяет контролировать превышение установленных скоростных порогов.
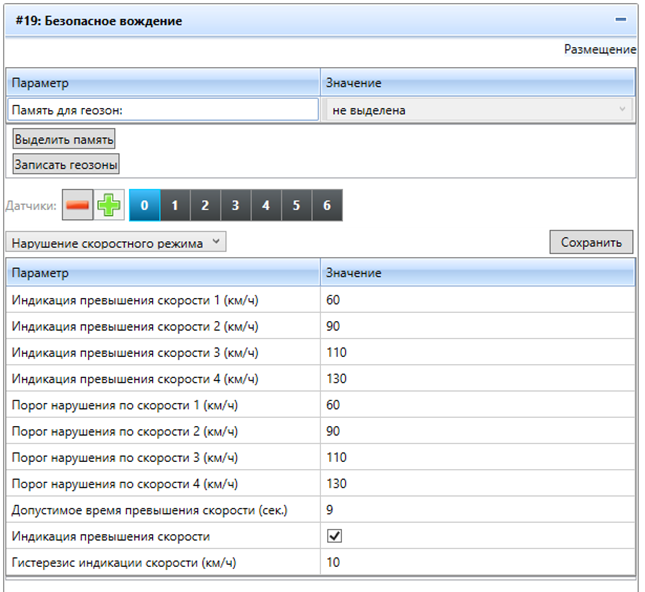
• «Индикация превышения скорости 1 (км/ч)» – скорость, при превышении которой раздается одиночный «длинный» звуковой сигнал (предупреждение водителю).
• «Индикация превышения скорости 2 (км/ч)» – скорость, при превышении которой раздается 2 «длинных» звуковых сигнала.
• «Индикация превышения скорости 3 (км/ч)» – скорость, при превышении которой раздается 3 продолжительных звуковых сигнала.
• «Индикация превышения скорости 4 (км/ч)» – скорость, при превышении которой раздается 4 продолжительных звуковых сигнала.
• «Порог нарушения по скорости 1 (км/ч)» – величина скорости, при превышении которой создается запись, содержащая информацию о данном событии, и запускается таймер «Допустимое время превышения скорости». По истечении времени, заданному в этом таймере, создается еще одна запись, содержащая (кроме прочего) значение текущей скорости. Если длительность нарушения скорости превышает «Допустимое время превышения скорости», то в момент падения скорости ниже порога создаётся ещё одна запись, позволяющая определить общую продолжительность превышения скорости.
• «Порог нарушения по скорости 2,3,4 (км/ч)» – аналогично «Порог нарушения по скорости 1 (км/ч)».
• «Допустимое время превышения скорости (сек.)» – временной интервал (таймаут), через который принудительно формируется дополнительная запись в журнал. Запускается сразу после превышения любого порога нарушения по скорости. Предназначен для выявления на стороне Сервера длительных нарушений (равных или превышающих «Допустимое время превышения скорости»).
• «Индикация превышения скорости» – позволяет включать и выключать звуковую индикацию о нарушениях скоростных порогов для водителя ТС. Установленная галочка включает индикацию.
По умолчанию максимально разрешенные скорости: 60, 90, 120 и 130 км/ч соответственно.
б) «Разгон/торможение» позволяет контролировать резкие разгоны и резкие торможения.
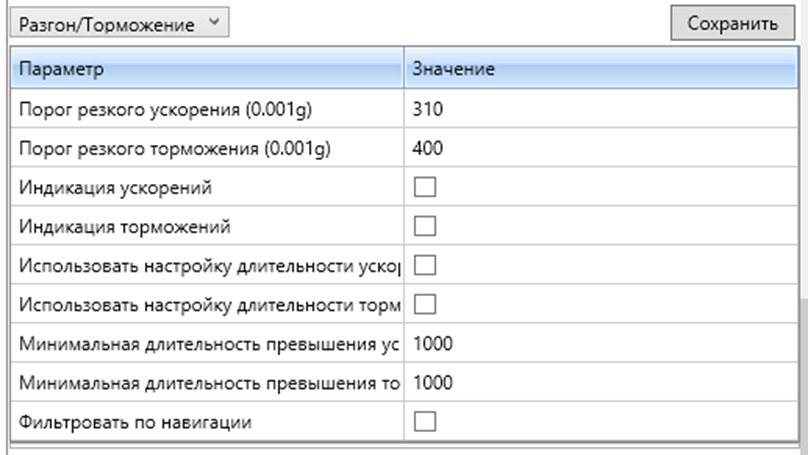
Тип датчика «Разгон/Торможение» имеет следующие параметры:
• «Порог резкого ускорения (0,001g)» – значение ускорения, при превышении которого раздается 3 коротких звуковых сигнала и формируется запись в журнал о резком маневре.
• «Порог резкого торможения (0,001g)» – значение ускорения на торможении, при превышении которого раздается 3 коротких звуковых сигнала и формируется запись в журнал о резком маневре.
• «Индикация ускорений» – позволяет включать и выключать звуковую индикацию о резких ускорениях.
• «Индикация торможений» – позволяет включать и выключать звуковую индикацию о резких торможениях.
• «Использовать настройку длительности ускорения» – позволяет вручную задавать длительность резкого ускорения, которое будет считаться нарушением.
• «Использовать настройку длительности торможения» – позволяет вручную задавать длительность резкого торможения, которое будет считаться нарушением.
• «Минимальная длительность превышения ускорения (мс.)» – минимальная длительность резкого ускорения, являющегося нарушением.
• «Минимальная длительность превышения торможения (мс.)» – минимальная длительность резкого торможения, являющегося нарушением.
• «Фильтровать по навигации» – позволяет включать и выключать фильтрацию резких ускорений и торможений по данным навигационного приёмника. При установленной галочке резкий манёвр, сильно расходящийся с расчётами по данным навигационного приёмника, будет считаться ложным и не будет учитываться.
в) «Боковое ускорение» позволяет контролировать резкие повороты.

Тип датчика «Боковое ускорение» имеет следующие параметры:
• «Порог резкого ускорения вправо (0,001g)» – значение ускорения при повороте направо, при превышении которого раздается 5 коротких звуковых сигналов и формируется запись в журнал о резком маневре.
• «Порог резкого ускорения влево (0,001g)» – значение ускорения при повороте налево, при превышении которого раздается 5 коротких звуковых сигналов и формируется запись в журнал о резком маневре.
• «Индикация поворотов» - позволяет включать и выключать звуковую индикацию о резких поворотах.
г) «Удар по подвеске» позволяет контролировать резкие удары по подвеске.
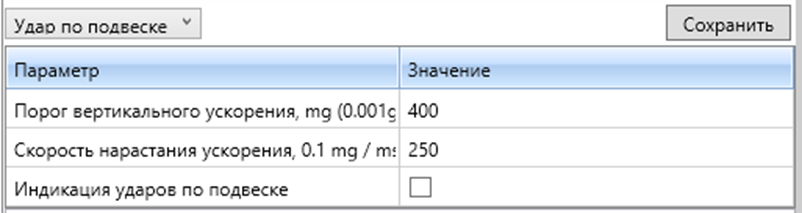
Тип датчика «Удар по подвеске» имеет следующие параметры:
• «Порог вертикального ускорения, mg (0,001g)» – значение удара по подвеске, при превышении которого раздается 2 кратковременных звуковых сигнала и формируется запись в журнал о резком ударе.
• «Скорость нарастания ускорения, 0,1 mg/ms (0,1mg/ms)» – скорость нарастания ускорения, являющегося нарушением.
• «Индикация ударов по подвеске» - позволяет включать и выключать звуковую индикацию об ударах по подвеске.
д) «Датчик удара» позволяет контролировать резкие удары по корпусу ТС, например на парковках или у спецтехники.

Тип датчика «Датчик удара» имеет следующие параметры:
• «Порог амплитуды ускорения, mg (0,001g)» - значение удара при превышении которого раздается 2 звуковых сигнала и формируется запись в журнал о резком ударе.
• «Индикация ударов по корпусу» - позволяет включать и выключать звуковую индикацию об ударе для водителя ТС.
е) «Движение задним ходом» - в целях обеспечения безопасности движения грузовых ТС и предотвращения возможных инцидентов, логистические компании зачастую запрещают грузовым ТС движение задним ходом в начале поездки. Датчик «Движения задним ходом» предназначен для контроля соблюдения этого запрета и формирования водителю уведомления (индикации зуммером) о нарушениях.
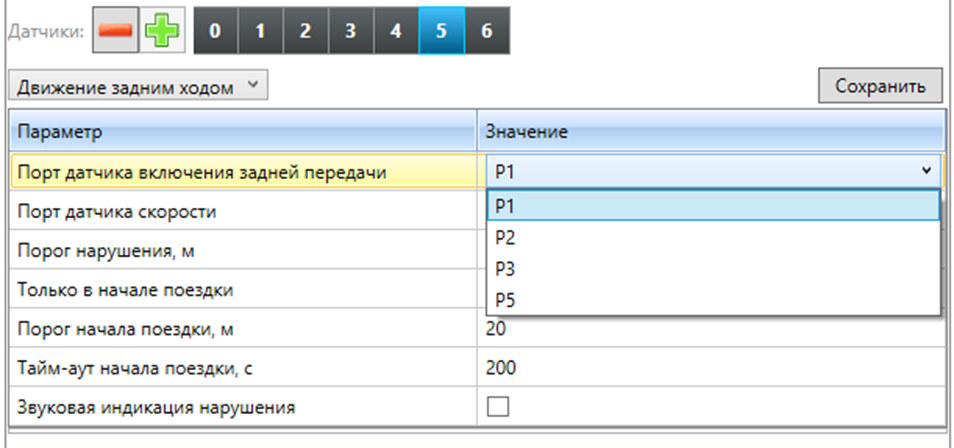
Тип датчика «Движение задним ходом» имеет следующие параметры:
• «Порт датчика включения задней передачи» - для получения данных о факте включения задней передачи, выбирается порт подключения датчика задней передачи. В выпадающем списке указаны порты, имеющие возможность работы в режиме дискретного входа – Р0, Р1, Р2, Р3.
• «Порт датчика скорости» - для получения данных о пройденном расстоянии, выбирается порт подключения датчика оборотов оси (датчик скорости). В выпадающем списке указаны порты, имеющие возможность работы в режиме счетного входа – Р0, Р1, Р2, Р3.
• «Порог нарушения, м» - позволяет задать расстояние, которое необходимо преодолеть задним ходом для того, чтобы было зафиксировано событие движения задним ходом. Возможный диапазон значений 1-200 м, значение по умолчанию - 6 м.
• «Только в начале поездки» - факт движения задним ходом может фиксироваться либо в начале поездки, либо на протяжении всего времени работы ТС. Если галочка установлена, то факт движения задним ходом фиксируется на протяжении заданного «Порога начала поездки, м», если не установлена, то факт движения задним ходом фиксируется в течение всего времени работы ТС.
• «Порог начала поездки, м» - расстояние, которое считается началом поездки. Возможный диапазон значений 1- 200 м, значение по умолчанию - 20 м.
• «Тайм-аут начала поездки, с» - временной интервал, после которого поездка считается начавшейся, независимо от пройденного расстояния. Возможный диапазон значений 1-2000 с, значение по умолчанию - 200 с.
• «Звуковая индикация нарушения» - позволяет включать и выключать звуковую индикацию при нарушении, зуммер издает однократный сигнал длительностью – 3 сек и формируется запись в журнал о резком ударе.
III. Выделение памяти
Для работы с ПОС (профилями ограничения скоростей) необходимо загрузить в Терминал файл, содержащий информацию о профилях ограничений скоростей и геозонах.
Перед загрузкой файла ПОС необходимо выделить память для хранения файла. Эта память выделяется из памяти журнала телеметрии и уменьшает его емкость примерно на 15%.
При этом возможна потеря не переданных данных, если они находятся в выделяемой области. Поэтому выделять память рекомендуется на новом Терминале, либо убедившись, что Терминал передал все данные из журнала на Сервер.
В случае если память не выделена – запись файла не будет произведена.
Операция выделения памяти НЕОБРАТИМА. Даже если выключить режим «Безопасное вождение», выделенная память не будет повторно использована журналом телеметрии.
Текущее состояние памяти для файла (выделена или нет) отображено в значении параметра «Память для геозон».
Для выделения памяти с помощью ПО «СКАУТ-Конфигуратор» необходимо нажать кнопку «Выделить память». Отправка команды возможна как при локальном, так и при удаленном подключении, при этом в случае удаленного подключения необходимо соблюдение следующих условий: на учетной записи, с которой производится настройка, должно быть в доступе менее 1000 терминалов, а статус терминала должен находиться в рабочем режиме.
После выполнения команды Терминал будет перезагружен. Значение параметра «Память для геозон» будет обновлено после повторного подключения.
IV. Загрузка файла геозон (ПОС) в Терминал.
Размер загружаемого файла ПОС НЕ должен превышать 2Мб (ограничение размера памяти в Терминале для хранения файла).
В случае если размер файла будет превышать 2Мб – в Терминал будут загружены и использованы только те геозоны, которые уместятся в указанный максимальный объём.
Подготовить файлы геозон (ПОС) следует в ПО «СКАУТ Студио Онлайн» (Подробнее ознакомиться с порядком подготовки файла геозон можно по этой ссылке).
Подготовленные файлы геозон (ПОС) сохранить на компьютер и/или, при необходимости, загрузить на FTP-сервер, который указан в настройках Терминала.
Для загрузки файла геозон (ПОС) с помощью ПО «Конфигуратор» необходимо нажать кнопку «Записать геозоны», после чего выбрать в выпавшем окне необходимый файл ПОС. Отправка команды возможна как при локальном, так и при удаленном подключении, при этом в случае удаленного подключения необходимо соблюдение следующих условий: на учетной записи, с которой производится настройка, должно быть в доступе менее 1000 терминалов, а статус терминала должен находиться в рабочем режиме.