Настройки подключения к бортовым цифровым шинам J1939 и J1708
МТ-600 поддерживает подключение к шинам штатных бортовых компьютеров, работающих по протоколам j1939 (интерфейс CAN) и j1708 (интерфейс RS-485). В настоящее время поддерживается передача до 3 параметров по каждому интерфейсу. Перечень параметров пользователь выбирает самостоятельно из списка поддерживаемых.
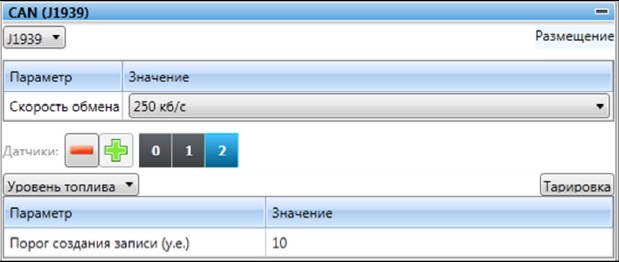
Рисунок 1 - Настройка параметров входа j1939
Общие параметры входа j1939:
- Скорость обмена – должна соответствовать скорости обмена в бортовой шине CAN. На большинстве автомобилей – 250 кбит/с.
- Датчики – кнопки «плюс» и «минус» увеличивают и уменьшают количество обрабатываемых датчиков. Кнопки с номером переключают окно настроек соответствующего датчика.
- Частные настройки каждого датчика аналогичны настройкам входа с подходящим типом датчика. Так, для параметра уровень топлива доступен параметр «Порог создания записи».