Схема 7. Подключение МТ-600 к бортовым цифровым шинам J1708 и CAN J1939
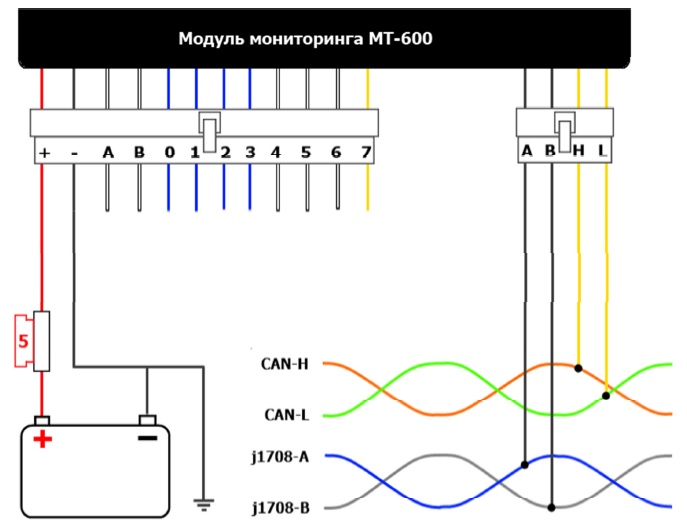
Рисунок 1 - Схема подключения к бортовым цифровым шинам J1708 и CAN J1939
Данная схема применима при подключении терминала МТ-600 в исполнении PRO к цифровым шинам автомобиля, работающим в стандартах j1708 и j1939. Возможно подключение как к одной из шин, так и к двум шинам разных стандартов одновременно:
- Провода CAN-L и CAN-H шины j1939 подключаются соответственно к выводам L и H порта CAN в дополнительном интерфейсном разъеме.
- Провода A и B шины j1708 подключаются соответственно к выводам A и B порта RS-485 в дополнительном интерфейсном разъеме.
ВНИМАНИЕ!
При подключении обеих шин необходимо убедиться в соблюдении полярности